한국과학기술연구원(KIST)은 지능로봇연구단 이종원 박사팀이 개발한 근력을 돕는 웨어러블 로봇으로 북한산 등정에 성공했다고 11일 밝혔다.
KIST 지능로봇연구단이 개발한 웨어러블 로봇을 착용하고 북한산 영봉 정상에 선 고령자. KIST 이번 등정은 해발 604m 북한산 영봉을 다리근력을 보조하는 웨어러블 로봇을 착용하고 배터리 교체 없이 성공한 것이어서 의미가 크다.
기존 근력도움 웨어러블 로봇은 무겁고 큰 부피 때문에 제한된 실내 환경에서 환자 재활용 등으로 활용되는 데 그쳤다.
반면 KIST가 개발한 웨어러블 로봇은 사용자 움직임을 예측하고 부족한 근력을 지원, 고령자의 재활은 물론 일상생활도 보조할 수 있다.
KIST 지능로봇연구단이 개발한 웨어러블 로봇을 착용하고 북한산을 오르는 고령자. KIST 주요기능은 골반 양측에 장착된 네 개의 초경량-고출력 구동기가 보행 시 균형을 맞출 수 있도록 보조해 다리근력을 최대 30%까지 강화할 수 있다.
특히 탑재된 인공지능(AI)이 보행상태를 실시간 분석, 완만한 흙길, 험한 바윗길, 가파른 나무계단, 불규칙한 돌계단 등 다양한 보행환경에도 안전하고 효과적으로 근력을 보조한다.
또 2㎏대 경량화를 실현, 고령자도 타인 도움 없이 쉽게 착용할 수 있어 실용성을 높였다.
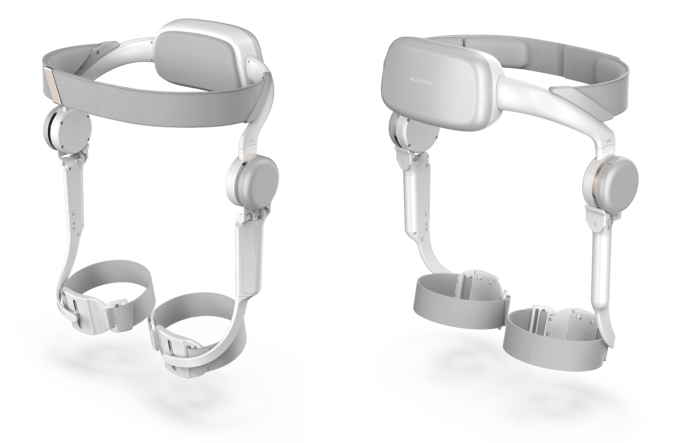
KIST 지능로봇연구단이 개발한 웨어러블 로봇. KIST 이 박사는 "이번 챌린지 성공으로 다양한 보행환경에서 안전하고 효과적인 근력보조가 가능한 데이터를 확보했다”며 “초경량, 고출력 웨어러블 로봇 구동기술을 인공지능과 융합해 고령자의 일상 보조를 비롯, 일상에서 폭넓게 활용할 수 있을 것”이라고 밝혔다.
KIST 지능로봇연구단이 개발한 웨어러블 로봇 착용 모습. KIST 한편 연구팀은 이번에 개발한 웨어러블 로봇을 ‘달에서 걷는 것처럼 돕는다’는 의미로 ‘MOONWALK-Omni’라 명명하고, 후속 연구로 고관절과 무릎 등 하지 복합관절을 동시 보조하는 ‘MOONWALK-Support’를 개발 중이다.