한국연구재단, 의료용 마이크로로봇 범용 제어기술 성과 발표
DGIST 최홍수 교수팀, 강화학습 기반 인공신경망 활용
기사승인 2024-01-13 13:16:07
체내로 들어가 작동하는 의료용 마이크로로봇이 원하는 위치까지 이동하려면 움직임을 정교하게 제어하는 기술 확보가 관건이다.
자성 마이크로로봇은 외부 전자기 구동시스템에서 생성된 자기장과 자기력을 이용해 원하는 위치까지 정밀하게 제어가 가능하다.
하지만 혈관, 종양 등에서 진단이나 치료 목적에 따라 다양한 형상을 갖는 자성 마이크로로봇은 각각의 임무에 맞춰 복잡한 구동체계를 설계해야 하는 어려움이 있어 많은 시간과 노력이 소요된다.
강화학습으로 범용 제어기술 개발
한국연구재단은 대구경북과학기술원(DGIST) 최홍수 교수팀이 자성 마이크로로봇의 3차원 위치를 범용적으로 정밀하게 제어할 수 있는 방법을 개발했다고 12일 밝혔다.
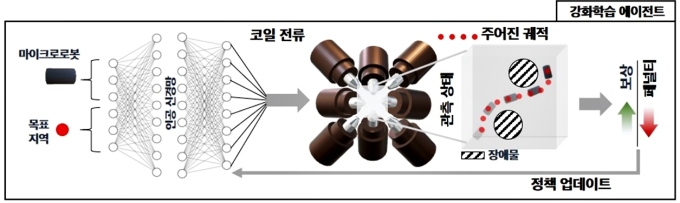
인공 신경망을 이용한 전자기 구동 시스템의 자성 마이크로로봇 제어 방법을 표현한 핵심 개념. 한국연구재단 연구팀은 강화학습을 기반으로 한 인공신경망을 활용해 수학·물리적 모델링 없이 다양한 형태의 마이크로로봇에 적용할 수 있는 것이 특징이다.
연구팀이 개발한 인공신경망은 전자기 구동시스템에 전류를 직접 인가하는 방식으로 마이크로로봇을 구동시키고, 그 결과를 직접 평가해 러로솝의 3차원 위치 제어법을 스스로 학습한다.
관심 영역 내에서 마이크로로봇을 목표 지역으로 제어하기 위해 전자기 구동 시스템의 코일 전류 제어 방식에 대해 강화 학습 에이전트의 학습. 한국연구재 이를 활용한 결과 마이크로로봇이 기존 제어 방식을 사용한 경우보다 약 50% 빠른 속도로 목표 위치에 도달했고, 위치 오차도 기존 방식보다 40%나 감소한 것을 확인했다.
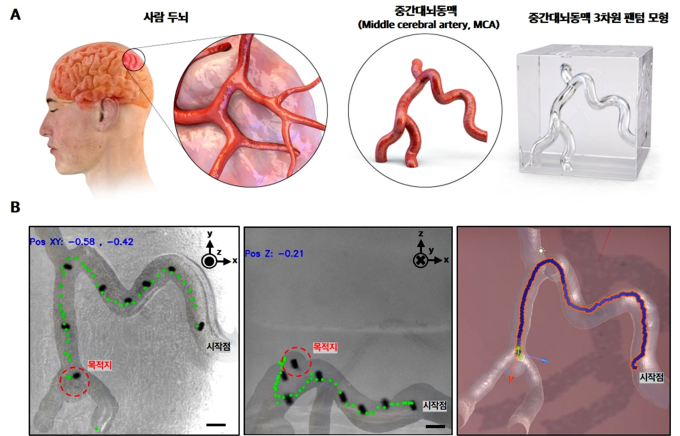
3차원 프린팅된 팬텀 내에서 강화학습법을 이용한 목표지점까지의 마이크로로봇 내비게이션 실험 결과. 한국연구재단 최 교수는 “이번 연구는 이전보다 적은 시간과 자원으로 다양한 형태의 마이크로로봇과 전자기 구동시스템에 적용될 수 있는 범용적 구동 체계가 될 것으로 기대된다”고 밝혔다.