한국에너지기술연구원(이하 에너지연) 청정연료연구실 박지찬 박사팀이 촉매 성능평가 실험을 사람의 개입 없이 완전 자동화하는 '로봇 기반 촉매 스크리닝 시스템'을 개발했다.
이 기술로 실험 속도는 45배 빨라지고, 결과 정확도도 대폭 향상돼 신소재 개발 기간을 획기적으로 단축할 것으로 기대된다.
새 촉매를 개발하려면 성분과 반응 조건을 조금씩 바꿔가며 많은 반복 실험을 거쳐야 한다. 기존에는 연구자가 직접 시료를 옮기고 장비를 조작해야 해서 시간이 오래 걸릴 뿐 아니라 사람마다 숙련도가 달라 결과의 오차가 생기는 문제가 있었다.
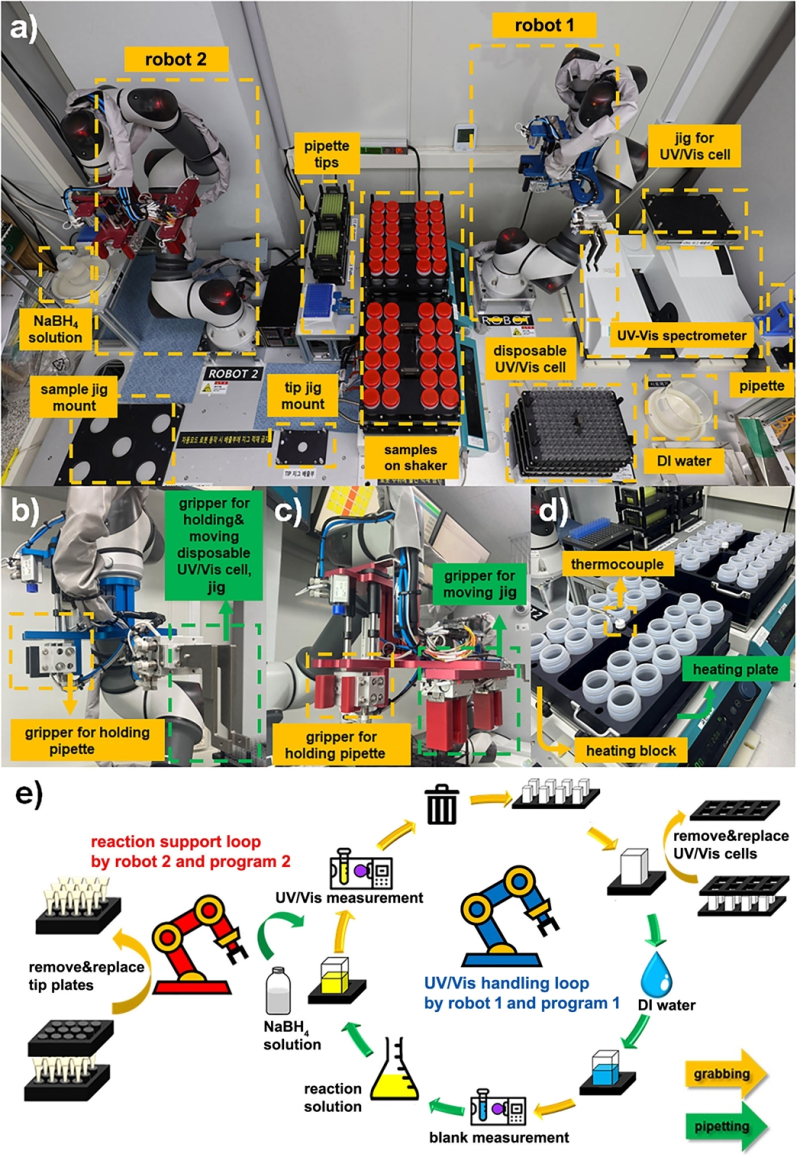
연구팀은 두 대의 로봇이 반응과 분석을 나눠 협업하는 시스템을 구축해 이 문제를 해결했다.
분석 로봇은 미리 입력된 시나리오에 따라 시료를 식별하고 용기를 정확한 위치에 장착한 뒤 자외선/가시광선(UV/Vis) 스펙트럼 측정 장비를 이용해 반응 결과를 분석한다.
또 운영 로봇은 실험이 끊기지 않도록 시료를 배치하거나 회수하고, 다 쓴 소모품을 교체하는 등 사람이 하던 유지 보수 작업을 수행한다.
두 로봇은 통합 제어로직으로 동시에 작동하며 24시간 멈춤 없이 실험을 이어간다.
로봇 팔 끝에는 피펫이나 측정 용기를 잡을 수 있는 전용 집게를 장착해 사람 손처럼 섬세한 작업이 가능하다.
이 시스템의 가장 큰 강점은 속도와 정확성이다.
실제 촉매 성능평가에서 숙련된 연구자가 32일 동안 매달려야 끝낼 수 있는 분량의 실험을 17시간 만에 마치며 기존 수작업 대비 45배 빠른 결과를 보였다.
아울러 데이터의 품질도 높아졌다.
로봇이 표준화된 동작으로 실험을 수행한 결과 수작업 실험에서 발생하던 결과값의 변동성이 약 32% 감소했다.
박 박사는 "이번 연구는 촉매 성능 평가의 완전 자동화를 넘어 대량 실험 환경에서도 신뢰도 높은 데이터를 확보할 수 있음을 입증한 것"이라며 "향후 다양한 촉매 반응과 소재 연구로 적용 범위를 넓혀 AI 기반 촉매 개발 기술로 발전시키겠다"고 밝혔다.
한편, 이번 연구는 에너지연 강신욱·오경희 연구원이 공동 제1저자로 참여했고, 연구결과는 지난해 12월 국제학술지 ‘케미컬 사이언스(Chemical Science, IF 7.5)’에 게재됐다.
(논문명: Fully automated and high-fidelity robotic platform enabling accelerated discovery of nanocatalysts)